Title
Geometry Processing
Fairing
Edward Chien
Computer Graphics & Geometry Processing
Overview
Recap: Parameterization
Recap: Smoothing
Membrane Surfaces
Thin Plate Surfaces
Linear System Solvers
Discrete Harmonic Maps
Map vertices on boundary \(\partial \set{S}\) homeomorphically to convex polygon \(\bar{\vec{u}}\) in the uv-plane \[\forall v_i \in \partial\set{S} \;:\; \vec{u}\of{v_i} = \bar{\vec{u}}_i\]
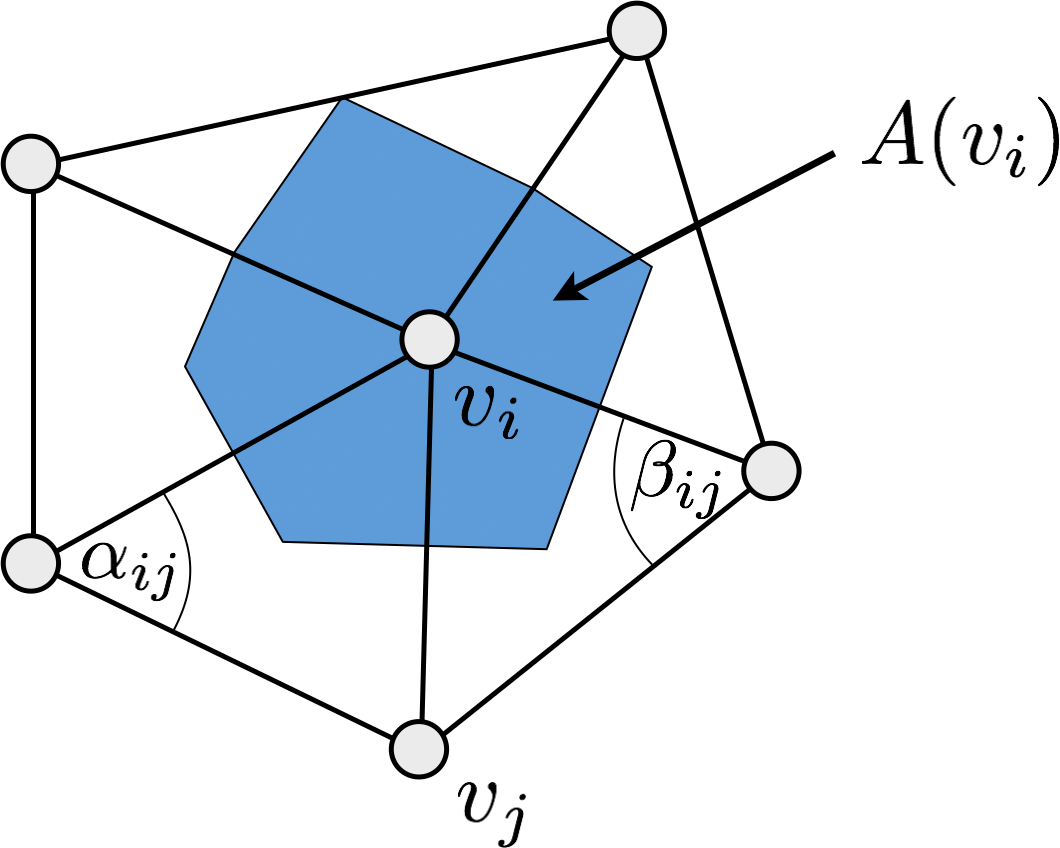
Solve \(\laplace_{\set{S}} \vec{u} = 0\) for all interior vertices \[\forall v_i \in \set{S} \setminus \partial\set{S} \;:\;
\sum_{v_j \in \set{N}_1\of{v_i}}
\big( \underbrace{\func{cot} \alpha_{ij} + \func{cot} \beta_{ij}}_{w_{ij}} \big)
\left( \vec{u}\of{v_j} - \vec{u}\of{v_i} \right) = \vec{0} \]
Iterative Solution
Iterate until convergence
Solve condition for each interior vertex individually\(w_{ij}\) fixed) \[ \forall v_i \in \set{S} \setminus \partial\set{S} \;:\;
\vec{u}\of{v_i} \;\leftarrow\;
\frac{1}{\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij}}
\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij} \vec{u}\of{v_j}\]
Why does it converge?
When does it converge?
Direct Solution
Assume that the vertices are partitioned/sorted into interior vertices \(v_1, \dots, v_n\) and boundary vertices \(v_{n+1}, \dots, v_{n+m}\)
Setup \((n+m) \times (n+m)\) system of linear equations from the conditions for interior vertices and boundary vertices \[
\matrix{ \rlap{\laplace_{n \times (n+m)}} \\ \mat{0}_{m \times n} & \mat{I}_{m \times m} } \cdot
\matrix{ \vec{u}_1\T \\ \vdots \\ \vec{u}_n\T \\ \vec{u}_{n+1}\T \\ \vdots \\ \vec{u}_{n+m}\T }
\;=\;
\matrix{ \vec{0}\T \\ \vdots \\ \vec{0}\T \\ \bar{\vec{u}}_{n+1}\T \\ \vdots \\ \bar{\vec{u}}_{n+m}\T }
\]
Direct Solution
Simplify this \((n+m) \times (n+m)\) linear system \[
\matrix{ \laplace_{n \times n} & \laplace_{n \times m} \\ \mat{0}_{m \times n} & \mat{I}_{m \times m} } \cdot
\matrix{ \vec{u}_1\T \\ \vdots \\ \vec{u}_n\T \\ \vec{u}_{n+1}\T \\ \vdots \\ \vec{u}_{n+m}\T }
\;=\;
\matrix{ \vec{0}\T \\ \vdots \\ \vec{0}\T \\ \bar{\vec{u}}_{n+1}\T \\ \vdots \\ \bar{\vec{u}}_{n+m}\T }
\]
Move the \(m\) known boundary vertices to right hand side\(m\) rows anymore) \[
\laplace_{n \times n} \cdot
\matrix{ \vec{u}_1\T \\ \vdots \\ \vec{u}_n\T }
\;=\;
\matrix{ \vec{0}\T \\ \vdots \\ \vec{0}\T }
-\laplace_{n \times m} \matrix{ \bar{\vec{u}}_{n+1}\T \\ \vdots \\ \bar{\vec{u}}_{n+m}\T }
\]
Direct Solution
This yields an \(n \times n\) linear system to solve for \(u\) and \(v\) coordinates. \[
\mat{D}\mat{M} \cdot \matrix{ \vec{u}_1\T \\ \vdots \\ \vec{u}_n\T }
\;=\;
\mat{D}\matrix{ \vec{b}_1\T \\ \vdots \\ \vec{b}_n\T }
\]
\[
\begin{align}
\mat{M}_{ij} \;&=\;
\begin{cases}
\func{cot}\alpha_{ij} + \func{cot}\beta_{ij}, &
i \ne j \,,\; j \in \set{N}_1\of{v_i} \setminus \partial\set{S} \\
-\sum_{v_j \in \set{N}_1\of{v_i}} \left( \func{cot}\alpha_{ij} + \func{cot}\beta_{ij} \right) &
i=j \\
0 & \text{otherwise}
\end{cases} \\[2mm]
\mat{D} \;&=\; \func{diag}\of{ \dots, \frac{1}{2A_i}, \dots} \\[2mm]
\vec{b}_i \;&=\;
-\sum_{v_j \in \set{N}_1\of{v_i} \cap \partial\set{S} }
\left( \func{cot}\alpha_{ij} + \func{cot}\beta_{ij} \right) \bar{\vec{u}}_j
\end{align}
\]
Direct Solution
Let’s make the system symmetric by removing \(\mat{D}\) .\[
-\mat{M} \cdot \matrix{ \vec{u}_1\T \\ \vdots \\ \vec{u}_n\T }
\;=\;
-\matrix{ \vec{b}_1\T \\ \vdots \\ \vec{b}_n\T }
\]
\[
\begin{align}
\mat{M}_{ij} \;&=\;
\begin{cases}
\func{cot}\alpha_{ij} + \func{cot}\beta_{ij}, &
i \ne j \,,\; j \in \set{N}_1\of{v_i} \setminus \partial\set{S} \\
-\sum_{v_j \in \set{N}_1\of{v_i}} \left( \func{cot}\alpha_{ij} + \func{cot}\beta_{ij} \right) &
i=j \\
0 & \text{otherwise}
\end{cases} \\[2mm]
\vec{b}_i \;&=\;
-\sum_{v_j \in \set{N}_1\of{v_i} \cap \partial\set{S} }
\left( \func{cot}\alpha_{ij} + \func{cot}\beta_{ij} \right) \bar{\vec{u}}_j
\end{align}
\]
Direct Solution
Solve sparse symmetric positive definite linear system \[
-\mat{M} \cdot \matrix{ \vec{u}_1\T \\ \vdots \\ \vec{u}_n\T }
\;=\;
-\matrix{ \vec{b}_1\T \\ \vdots \\ \vec{b}_n\T }
\]
Allows for efficient linear system solvers
Iterative: Conjugate Gradients
Direct: Sparse Cholesky
more details later…
What about iterative solution?
Iterate until convergence
Solve condition for each interior vertex individually (keep \(w_{ij}\) fixed) \[ \forall v_i \in \set{S} \setminus \partial\set{S} \;:\;
\vec{u}\of{v_i} \;\leftarrow\;
\frac{1}{\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij}}
\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij} \vec{u}\of{v_j}\]
Why does this work?
Update corresponds to one Gauss-Seidel iteration for \(\laplace\vec{u}=\vec{0}\) .
When solving \(\mat{A}\vec{x}=\vec{b}\) iterate: \(x_i \leftarrow \frac{1}{a_{ii}} \left( b_i - \sum_{j \neq i} a_{ij} x_j \right)\)
Solves each condition/row individually, one after the other
Converges for diagonally dominant matrices: \(\abs{a_{ii}} \geq \sum_{j \neq i} \abs{a_{ij}}\)
Very simple, but very slow for larger matrices…
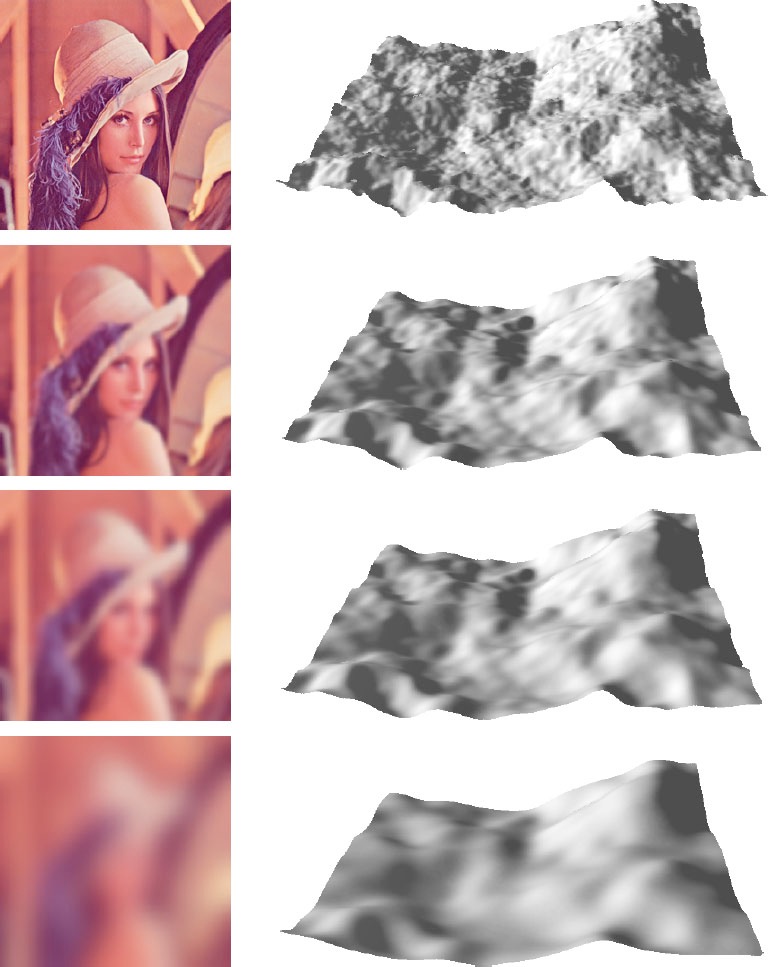
Diffusion Flow
Diffusion equation \[\frac{\partial f}{\partial t} = \lambda \Delta f\]
\(\lambda\) is the diffusion constant\(\Delta\) is the Laplace operator
Diffusion Flow
2nd order elliptic PDE \[\frac{\partial f(x,y,t)}{\partial t} \;=\; \lambda
\left(
\frac{\partial^2 f(x,y,t)}{\partial x^2} +
\frac{\partial^2 f(x,y,t)}{\partial y^2}
\right)\]
Solve numerically
Discretize in space & time
Discretize time derivative
Discretize spatial derivatives
Explicit Integration
Use normalized weights and ignore the area term \[\vec{x}_i \leftarrow \vec{x}_i + \delta t \, \lambda \Delta \vec{x}_i\] \[\laplace \vec{x}_i \;=\;
\frac{1}{\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij}}
\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij} \left( \vec{x}_j - \vec{x}_i \right) \]
Largest stable time-step is \(\delta t \lambda = 1\) , which yields \[\vec{x}_i \leftarrow
\frac{1}{\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij}}
\sum_{v_j \in \set{N}_1\of{v_i}} w_{ij} \vec{x}_j\]
This is exactly one Gauss-Seidel iteration for \(\laplace\vec{x}=0\) !
Explicit integration will converge to this solution
Implicit Integration
Matrix version of implicit integration \[\left( \mat{I} - \delta t \laplace \right) \, \vec{X}^{(t+1)} = \vec{X}^{(t)}\]
Implicit integration works for any time-step!
Largest stable time-step is \(\infty\) , which yields \[ \left( \frac{1}{\delta t}\vec{I} - \laplace \right) \, \vec{X}^{(t+1)} \;=\; \frac{1}{\delta t}\vec{X}^{(t)} \] \[ \underset{\delta t \to \infty}{\longrightarrow} \;\; -\laplace \, \vec{X}^{(t+1)} \;=\; \vec{0} \]
Implicit integration also converges to \(\laplace\vec{x}=\vec{0}\) .
Very similar to parameterization!
Fair Surfaces
Main idea:
Penalize “unaesthetic behavior”
Avoid unnecessary oscillations
Principle of the simplest shape
Minimize some fairness functional
Look for physical interpretation
Minimize surface area → membrane surface
Minimize curvature → thin plate surface
Membrane Surfaces
Minimize surface area \[\int_\set{S} \func{d}A \;\to\; \min
\quad\text{with}\quad \delta\set{S}=\bar{\vec{x}}\]
Simpler energy using partial derivativesDirichlet energy ) \[\int_\Omega
\norm{\vec{x}_{,u}}^2 +
\norm{\vec{x}_{,v}}^2
\func{d}u\func{d}v
\;\to\;\min\]
Variational calculus gives \[
\begin{align}
\laplace_{\set{S}} \vec{x} &= \vec{0}, &
\vec{x} \in \set{S} \setminus \partial\set{S} \\
\vec{x} &= \bar{\vec{x}}, &
\vec{x} \in \partial\set{S}
\end{align}
\]
Discretization
Assume that the vertices are partitioned/sorted into interior vertices \(v_1, \dots, v_n\) and boundary vertices \(v_{n+1}, \dots, v_{n+m}\) \[
\matrix{ \rlap{\laplace_{n \times (n+m)}} \\ \mat{0}_{m \times n} & \mat{I}_{m \times m} } \cdot
\matrix{ \vec{x}_1\T \\ \vdots \\ \vec{x}_n\T \\ \vec{x}_{n+1}\T \\ \vdots \\ \vec{x}_{n+m}\T }
\;=\;
\matrix{ \vec{0}\T \\ \vdots \\ \vec{0}\T \\ \bar{\vec{x}}_{n+1}\T \\ \vdots \\ \bar{\vec{x}}_{n+m}\T }
\]
Applying same tricks as for parameterization leads to \[
-\mat{M} \cdot \matrix{ \vec{x}_1\T \\ \vdots \\ \vec{x}_n\T }
\;=\;
-\matrix{ \vec{b}_1\T \\ \vdots \\ \vec{b}_n\T }
\]
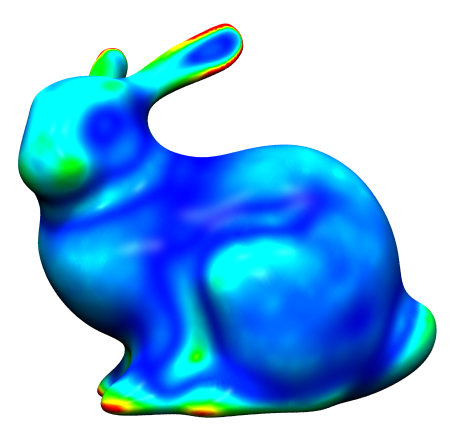
Membrane Surfaces aka Minimal Surface
Mean curvature \(H = \frac{\kappa_1 + \kappa_2}{2}\)
\(\laplace_{\set{S}} \vec{x} = -2 H \vec{n}\) \(H = 0\) everywhere → membrane surface\(\laplace_{\set{S}} \vec{x} = \vec{0}\) → smoothing stops
Connection to smoothing & parameterization
Membrane surfaces are stationary under smoothing
Smoothing converges to membrane surface
Parameterization also minimizes area, but flattens boundary first
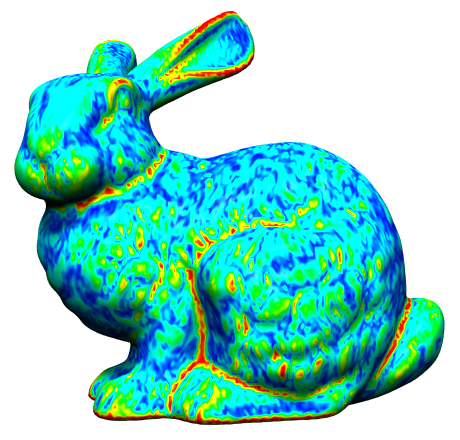
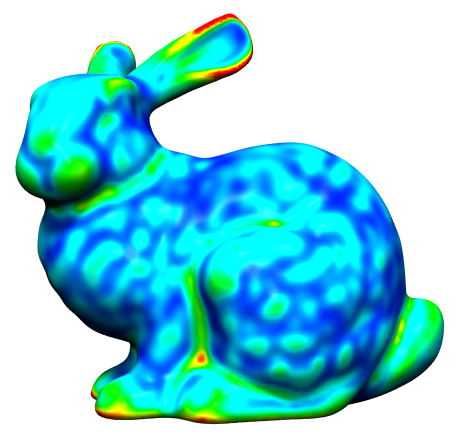
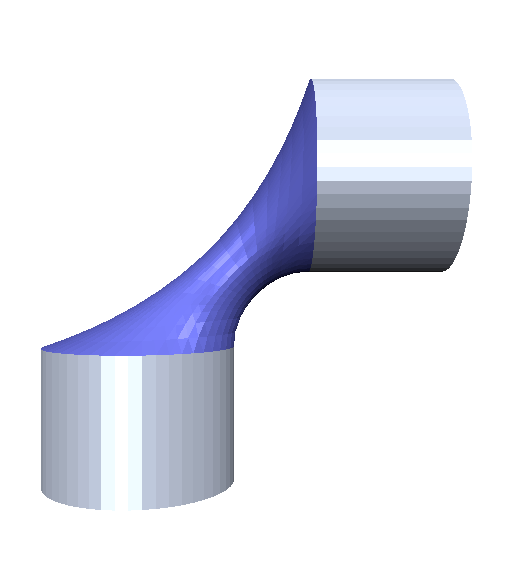
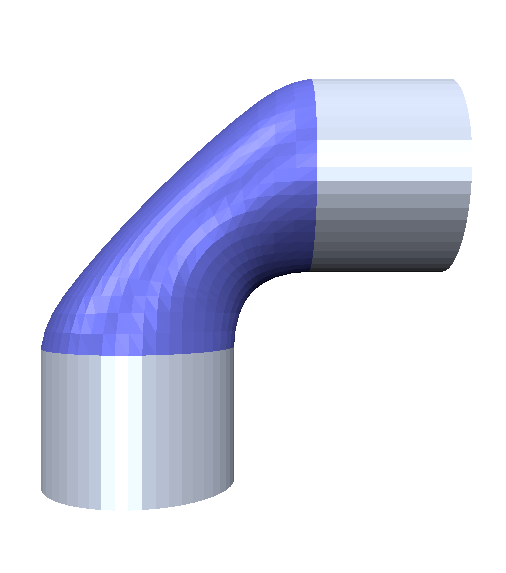
Thin Plate Surfaces
Minimize surface curvature \[\int_\set{S} \kappa_1^2 + \kappa_2^2 \,\func{d}A \to \min
\;\text{with}\;
\begin{cases}
\delta\set{S}=\bar{\vec{x}} \\
\vec{n}\of{\delta\set{S}}=\bar{\vec{n}}
\end{cases}\]
Simpler energy using partial derivativesthin plate energy ) \[\int_\Omega
\norm{\vec{x}_{,uu}}^2 +
2\norm{\vec{x}_{,uv}}^2 +
\norm{\vec{x}_{,vv}}^2
\func{d}u\func{d}v
\;\to\;\min\]
Variational calculus gives \[\begin{align}
\laplace_{\set{S}}^2 \vec{x} &= \vec{0}, &
\vec{x} \in \set{S} \setminus \partial\set{S} \\
\vec{x} &= \bar{\vec{x}}, & \vec{x} \in \partial\set{S} \\
\vec{n}\of{\vec{x}} &= \bar{\vec{n}}, & \vec{x} \in \partial\set{S} \\
\end{align}\]
Discretization
Assume that the vertices are partitioned into interior vertices \(v_1, \dots, v_n\) and two rings of boundary vertices \(v_{n+1}, \dots, v_{n+m}\) \[
\matrix{ \rlap{\laplace_{n \times (n+m)}^2} \\ \mat{0}_{m \times n} & \mat{I}_{m \times m} } \cdot
\matrix{ \vec{x}_1\T \\ \vdots \\ \vec{x}_n\T \\ \vec{x}_{n+1}\T \\ \vdots \\ \vec{x}_{n+m}\T }
\;=\;
\matrix{ \vec{0}\T \\ \vdots \\ \vec{0}\T \\ \bar{\vec{x}}_{n+1}\T \\ \vdots \\ \bar{\vec{x}}_{n+m}\T }
\]
Recursive Laplace discretization \[
\laplace^2 f\of{v_i} \;=\;
\laplace\of{\laplace f\of{v_i}} \;=\;
\frac{1}{2 A_i}
\sum_{v_j \in \set{N}_1\of{v_i}}
\left( \func{cot} \alpha_{ij} + \func{cot} \beta_{ij} \right)
\left( \laplace f \of{v_j} - \laplace f \of{v_i} \right)
\]
Discretization
Assume that the vertices are partitioned into interior vertices \(v_1, \dots, v_n\) and two rings of boundary vertices \(v_{n+1}, \dots, v_{n+m}\) \[
\matrix{ \rlap{\laplace_{n \times (n+m)}^2} \\ \mat{0}_{m \times n} & \mat{I}_{m \times m} } \cdot
\matrix{ \vec{x}_1\T \\ \vdots \\ \vec{x}_n\T \\ \vec{x}_{n+1}\T \\ \vdots \\ \vec{x}_{n+m}\T }
\;=\;
\matrix{ \vec{0}\T \\ \vdots \\ \vec{0}\T \\ \bar{\vec{x}}_{n+1}\T \\ \vdots \\ \bar{\vec{x}}_{n+m}\T }
\]
Move fixed vertices to right hand side and remove one \(\mat{D}\) \[
\mat{M}\mat{D}\mat{M} \cdot \matrix{ \vec{x}_1\T \\ \vdots \\ \vec{x}_n\T }
\;=\;
\matrix{ \vec{b}_1\T \\ \vdots \\ \vec{b}_n\T }
\]
Energy Functionals
Membrane surface \[\laplace_{\set{S}} \vec{x} = 0\]
Thin plate surface \[\laplace_{\set{S}}^2 \vec{x} = 0\]
Minimum variation surface \[\laplace_{\set{S}}^3 \vec{x} = 0\]
Linear System Solvers
Solvers for sparse symmetric positive definite systems?
Dense Cholesky factorization
Cubic complexity, high memory consumption 👎
Iterative conjugate gradients
Quadratic complexity, low memory consumption 👍
Multigrid solvers
Linear complexity, but complicated to use 😟
Sparse Cholesky factorization
Almost linear complexity and very easy to use! 😍
Benchmark: Laplace Systems
10k, 20k, 30k, 40k, 50k
Conjugate Gradients, 1.75, 3.78, 5.96, 7.86, 10.72
Multigrid, 0.89, 1.89, 2.96, 4.05, 5.49
Sparse Cholesky, 0.24, 0.51, 0.84, 1.18, 1.54
Benchmark: Laplace Systems
10k, 20k, 30k, 40k, 50k
Conjugate Gradients, 0.08, 0.21, 0.38, 0.56, 0.98
Multigrid, 0.09, 0.19, 0.27, 0.33, 0.57
Sparse Cholesky, 0.01, 0.03, 0.05, 0.06, 0.1
Benchmark: Laplace2 Systems
10k, 20k, 30k, 40k, 50k
Conjugate Gradients, 6.55, 14.54, 25.5, 38.33, 44.09
Multigrid, 1.53, 3.17, 4.89, 6.24, 9.21
Sparse Cholesky, 0.63, 1.4, 2.38, 3.34, 4.52
Benchmark: Laplace2 Systems
10k, 20k, 30k, 40k, 50k
Conjugate Gradients, 0.44, 1.5, 5.46, 10.6, 8.95
Multigrid, 0.48, 0.84, 1.23, 1.47, 2.34
Sparse Cholesky, 0.03, 0.08, 0.13, 0.2, 0.26
Literature
Botsch et al., Polygon Mesh Processing , AK Peters, 2010
Chapter 4: Smoothing & Fairing
Appendix A: Numerics
Desbrun, Meyer, Schröder, Barr: Implicit Fairing of Irregular Meshes using Diffusion and Curvature Flow , SIGGRAPH 1999
Desbrun, Meyer, Alliez: Intrinsic Parameterizations of Surface Meshes , Eurographics 2002
Jacobson, Tosun, Sorkine, Zorin: Mixed Finite Elements for Variational Surface Modeling , SGP 2010