Title
Geometry Processing
Shape Deformation
Computer Graphics & Geometry Processing
Shape Deformation
Membrane Surfaces
- Minimize surface area \[\int_\set{S} \func{d}A \;\to\; \min \quad\text{with}\quad \delta\set{S}=\bar{\vec{x}}\]
- Simpler energy using partial derivatives \[\int_\Omega \norm{\vec{x}_{,u}}^2 + \norm{\vec{x}_{,v}}^2 \func{d}u\func{d}v \;\to\;\min\]
- Variational calculus gives \[ \begin{align} \laplace_{\set{S}} \vec{x} &= \vec{0}, & \vec{x} \in \set{S} \setminus \partial\set{S} \\ \vec{x} &= \bar{\vec{x}}, & \vec{x} \in \partial\set{S} \end{align} \]
Thin Plate Surfaces
- Minimize surface curvature \[\int_\set{S} \kappa_1^2 + \kappa_2^2 \,\func{d}A \to \min \;\text{with}\; \begin{cases} \delta\set{S}=\bar{\vec{x}} \\ \vec{n}\of{\delta\set{S}}=\bar{\vec{n}} \end{cases}\]
- Simpler energy using partial derivatives \[\int_\Omega \norm{\vec{x}_{,uu}}^2 + 2\norm{\vec{x}_{,uv}}^2 + \norm{\vec{x}_{,vv}}^2 \func{d}u\func{d}v \;\to\;\min\]
- Variational calculus gives \[\begin{align} \laplace_{\set{S}}^2 \vec{x} &= \vec{0}, & \vec{x} \in \set{S} \setminus \partial\set{S} \\ \vec{x} &= \bar{\vec{x}}, & \vec{x} \in \partial\set{S} \\ \vec{n}\of{\vec{x}} &= \bar{\vec{n}}, & \vec{x} \in \partial\set{S} \\ \end{align}\]
Fairness Functionals
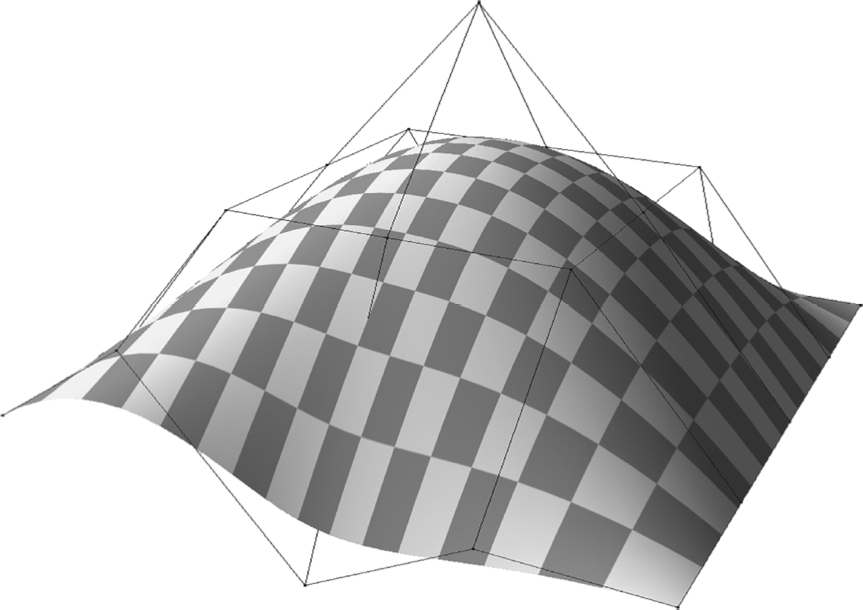
Spline Surfaces
- Tensor product surfaces
- “Curves of curves”
- Rectangular grid of control points
- Rectangular surface patch
- Problems
- Many patches for complex models
- Smoothness across patch boundaries
- Trimming for non-rectangular patches
Subdivision Surfaces
- Generalization of spline curves / surfaces
- Arbitrary control meshes
- Successive mesh refinement with simple rules
- Converges to smooth limit surface
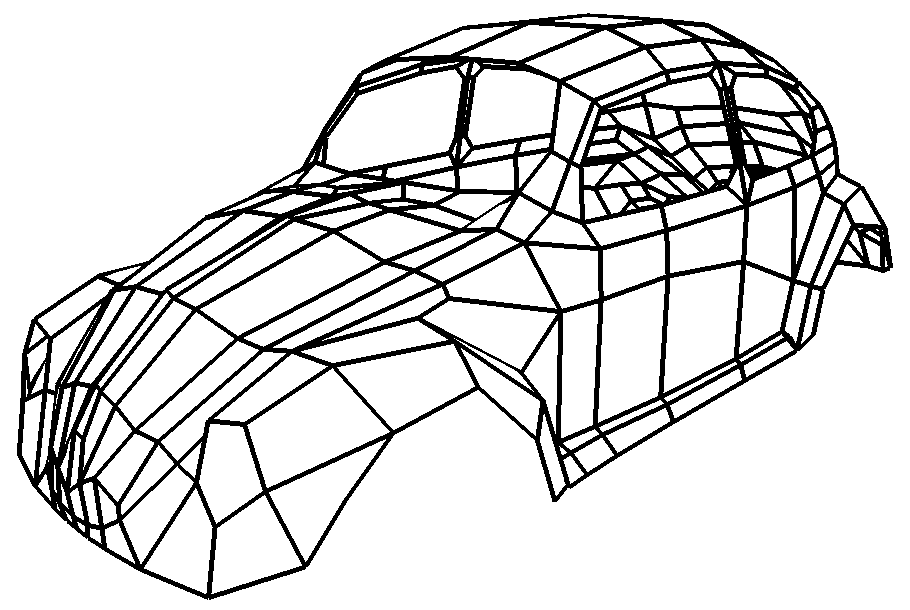
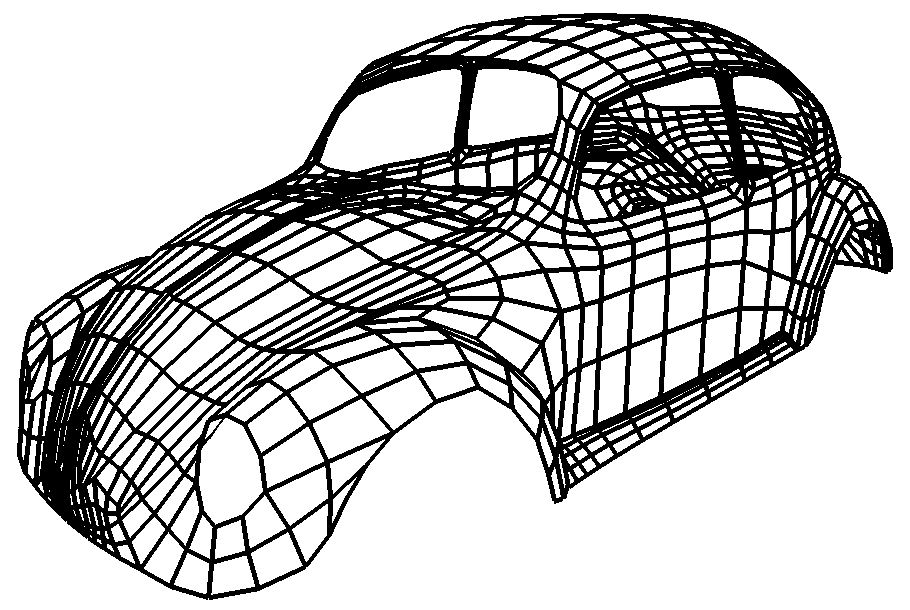
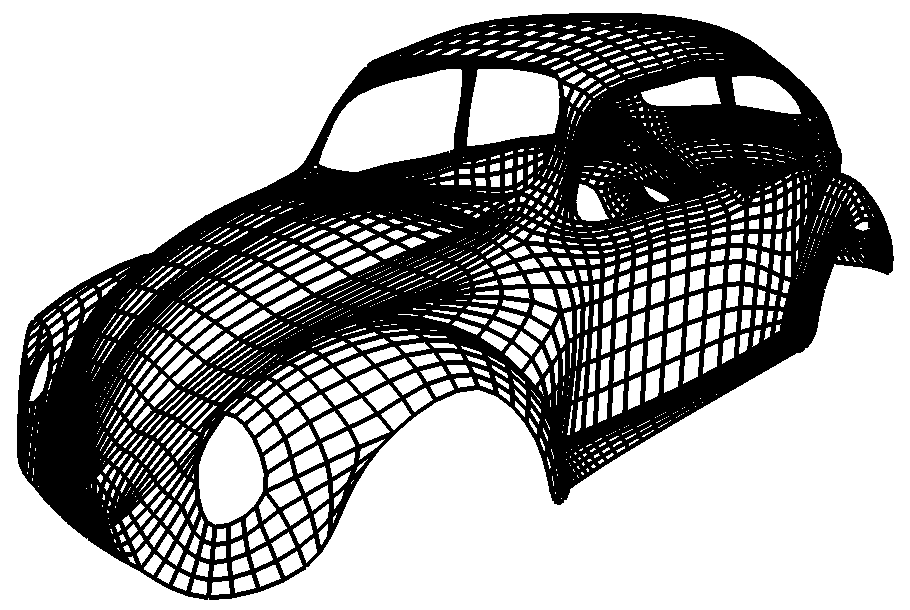

Spline & Subdivision Surfaces
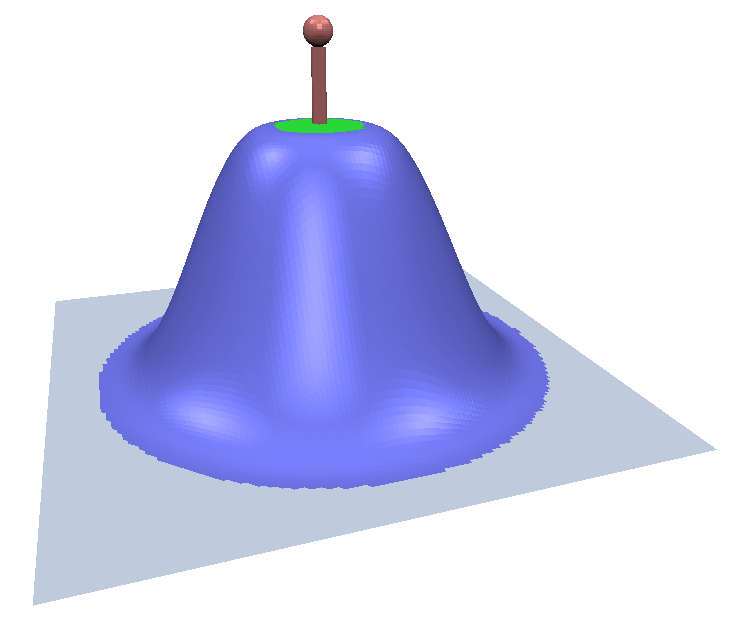
- Basis functions are smooth bumps
- Fixed support
- Fixed control grid
- Bound to control points
- Initial patch layout is crucial
- Patch design requires experts
- Decouple deformation from surface representation!
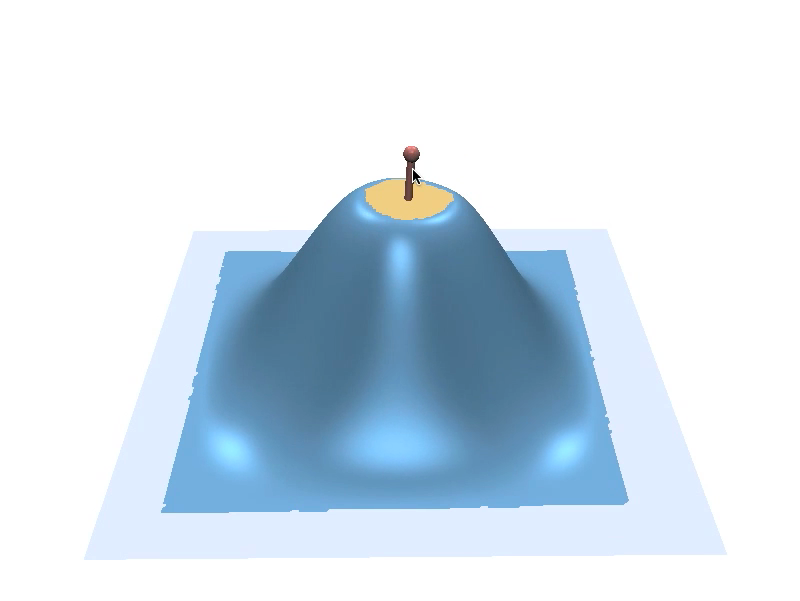
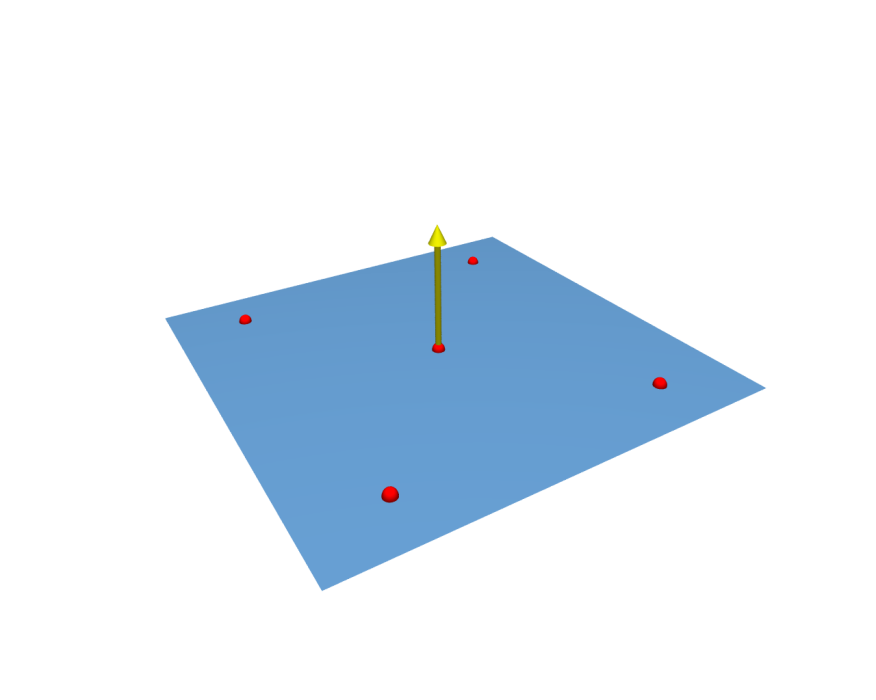
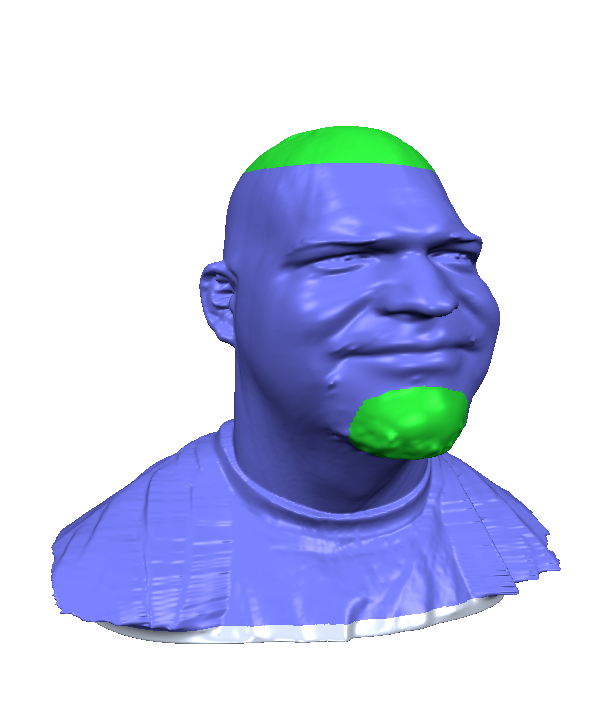
Modeling Metaphor
- Mesh deformation through displacement function \(\vec{d} \colon \set{S} \to \R^3\)
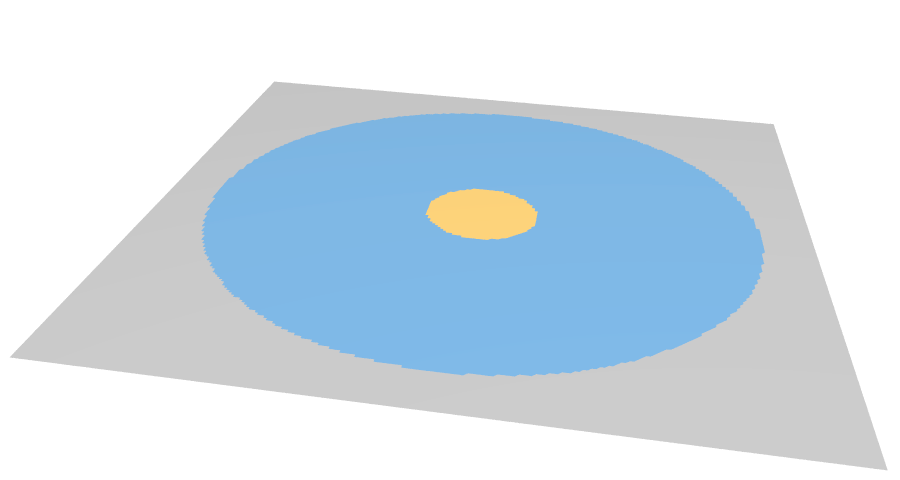
- Fix some vertices (gray)
- Interactively displace handle vertices (yellow)
- Solve for displacement of remaining vertices (blue)
\[
\begin{align*}
\vec{d} \colon \set{S} &\to \R^3\\
\vec{x}_i &\mapsto \vec{x} + \vec{d}\of{\vec{x}_i}
\end{align*}
\]
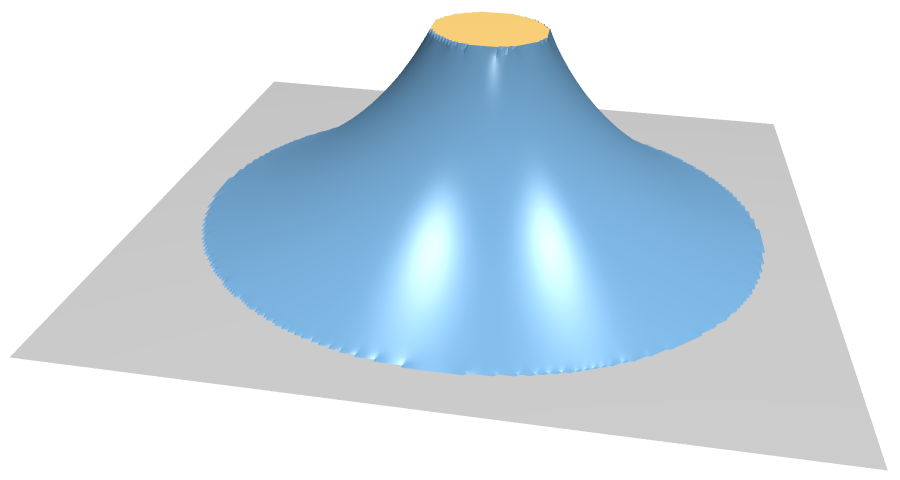
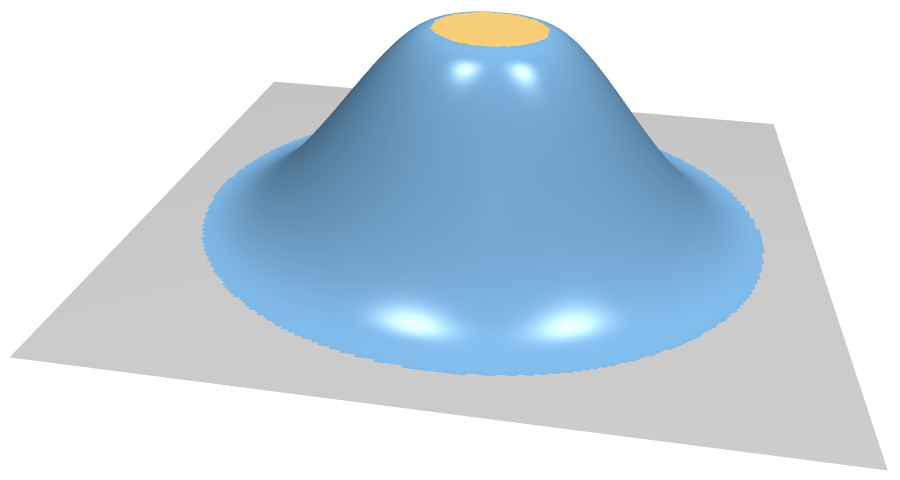
Deformation Energies
Discretization
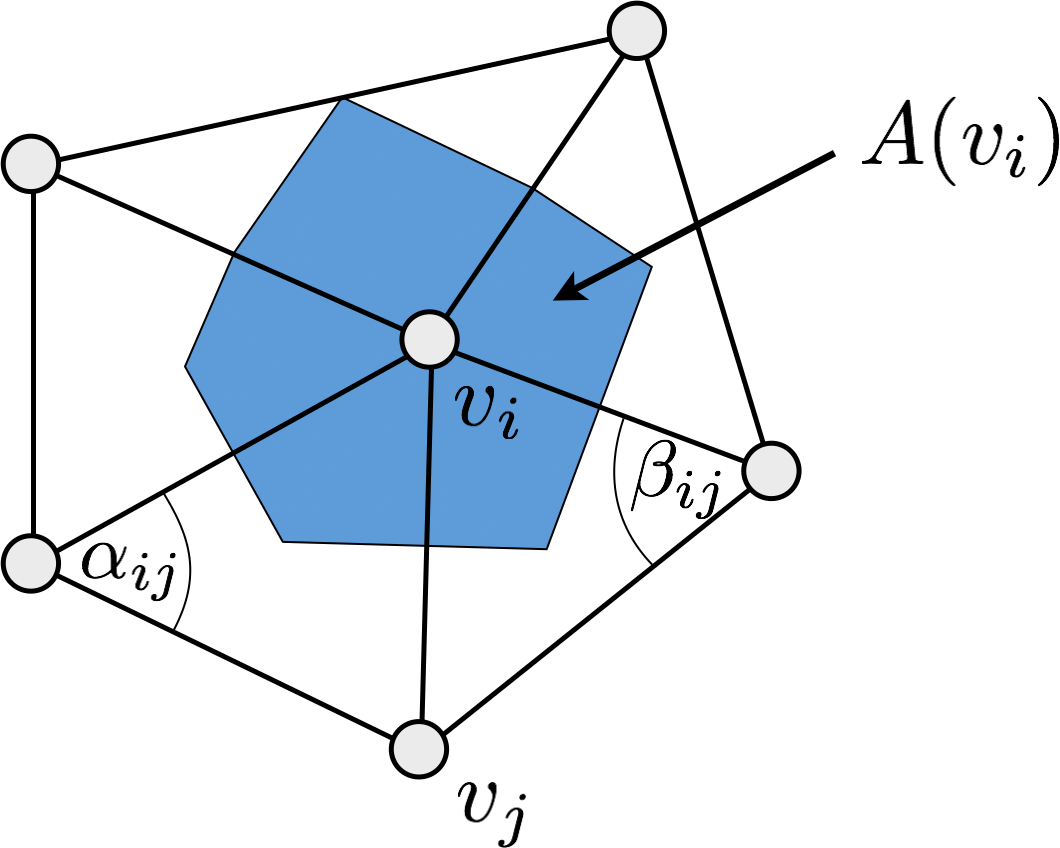
- Discretization of Laplace & bi-Laplace \[ \begin{align} \laplace \vec{d}_i &= \frac{1}{2A_i} \sum_{j\in\set{N}_i} \left( \cot\alpha_{ij}+\cot\beta_{ij} \right) \left( \vec{d}_j - \vec{d}_i \right) \\[2mm] \laplace^2\vec{d}_i &= \laplace\of{\laplace\vec{d}_i} \end{align} \]
- Leads to sparse linear system \[ \matrix{ & \color{blue}{\laplace^2} & \\ \mat{0} & \color{gray}{\mat{I}} & \mat{0} \\ \mat{0} & \mat{0} & \color{green}{\mat{I}} } \matrix{ \vdots \\ \vec{d}_i \\ \vdots } \;=\; \matrix{ \color{blue}{\mat{0}} \\ \color{gray}{\mat{0}} \\ \color{green}{\delta\vec{h}_i} } \]
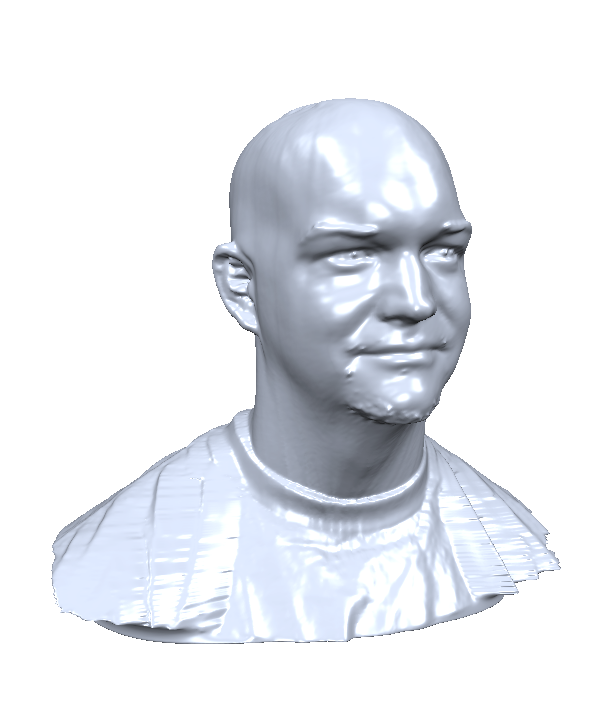
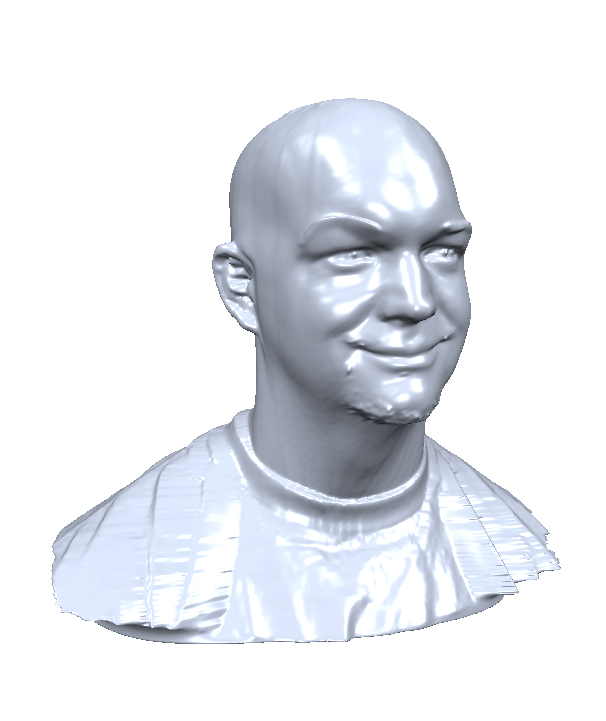
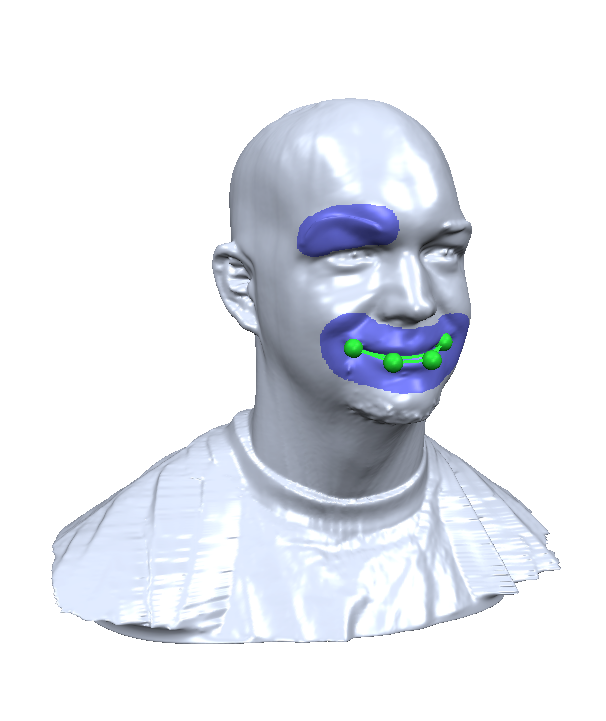
Linear Face Deformation
- MoCap markers control facial deformation
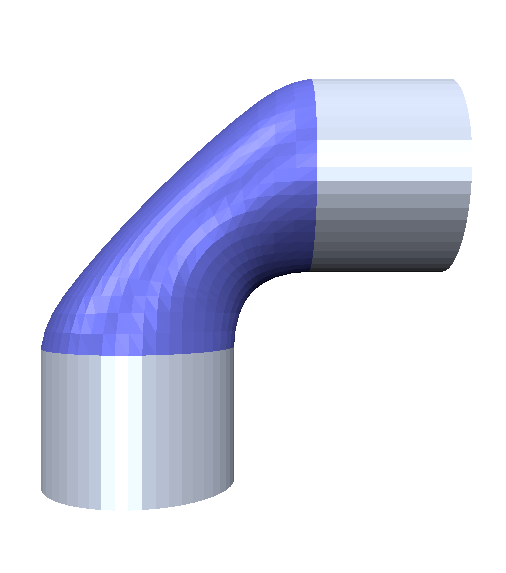
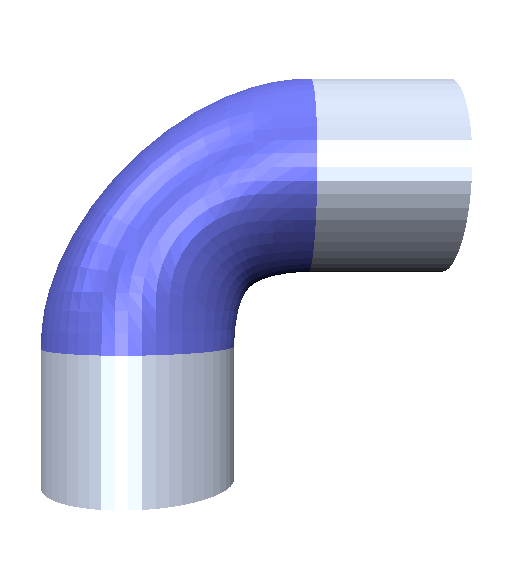
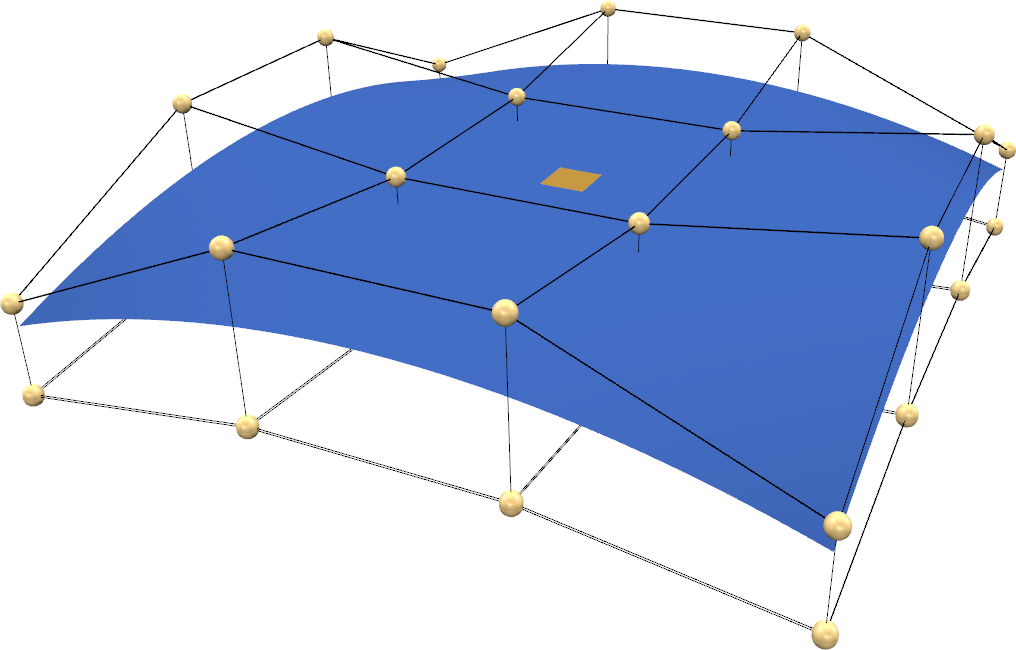
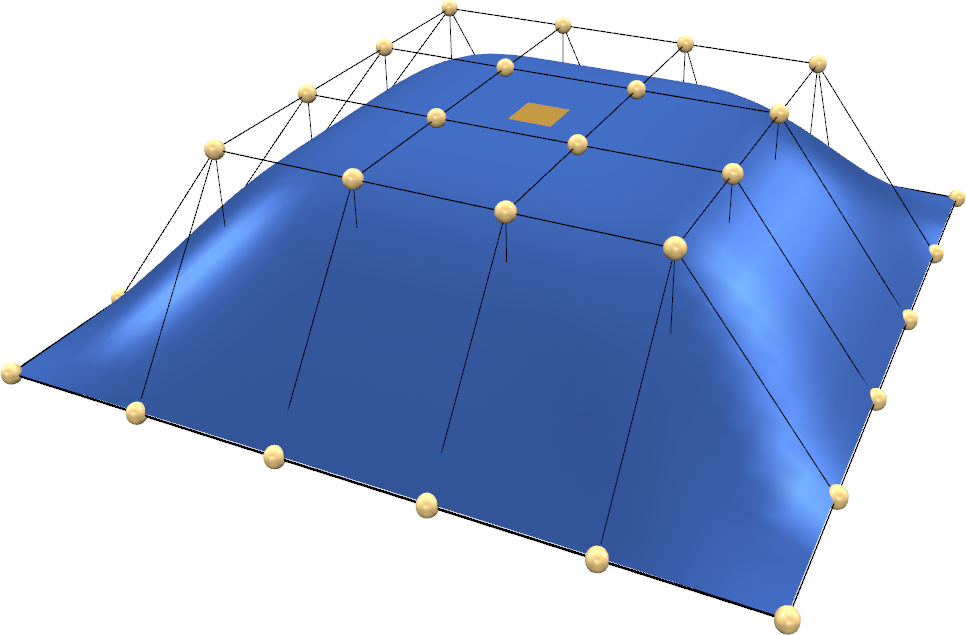
![deform-plane-1.png]()
![deform-plane-2.png]()
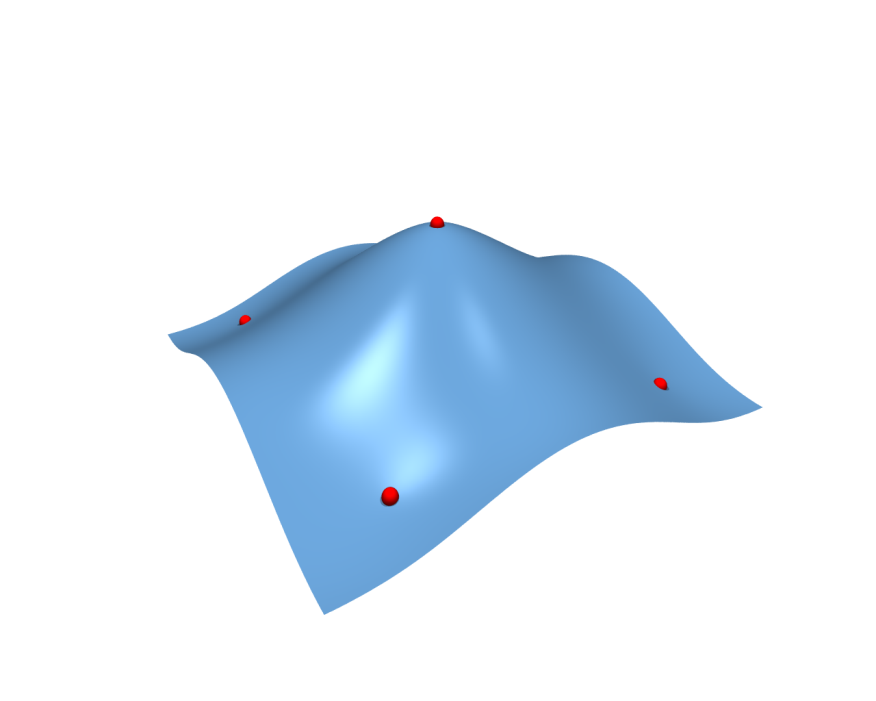
- Minimize quadratic bending energy by solving linear system
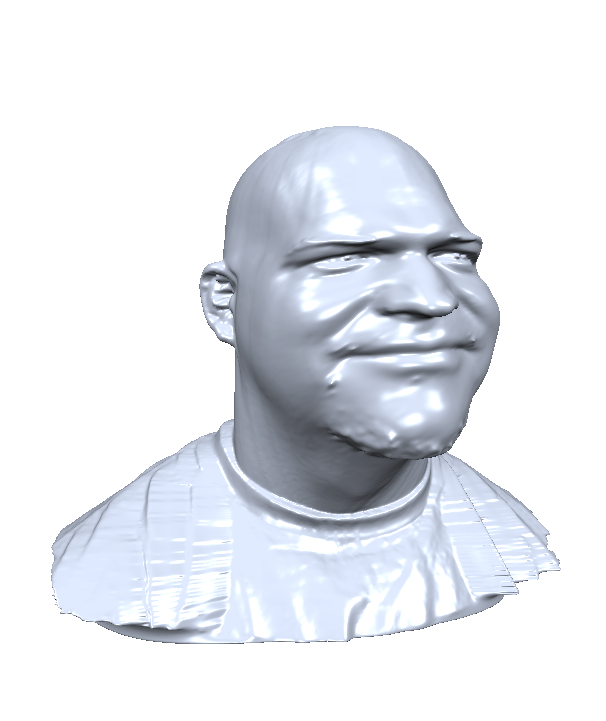
Limitations
Problematic cases for surface-based/mesh-based deformations

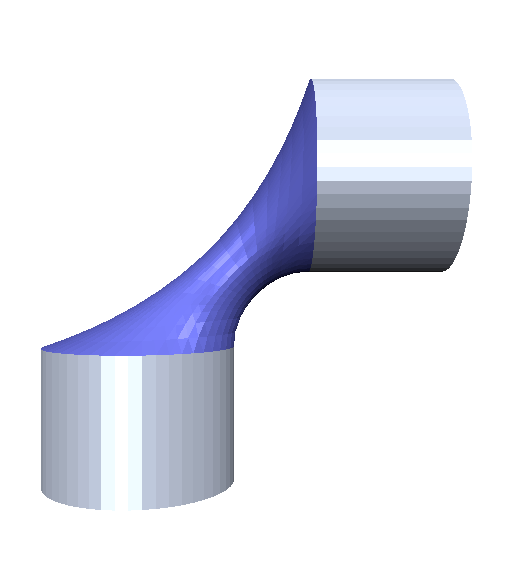
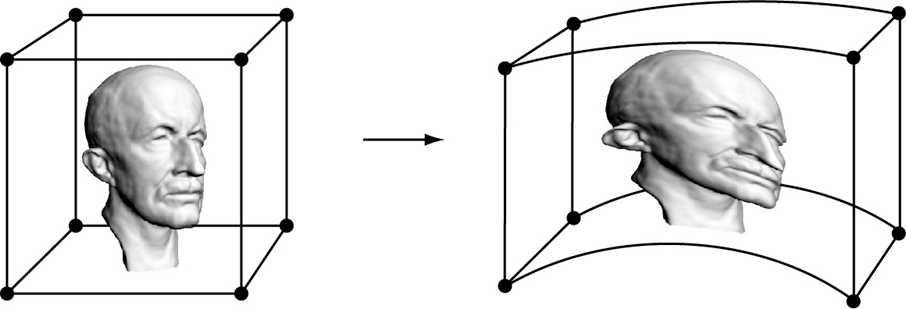
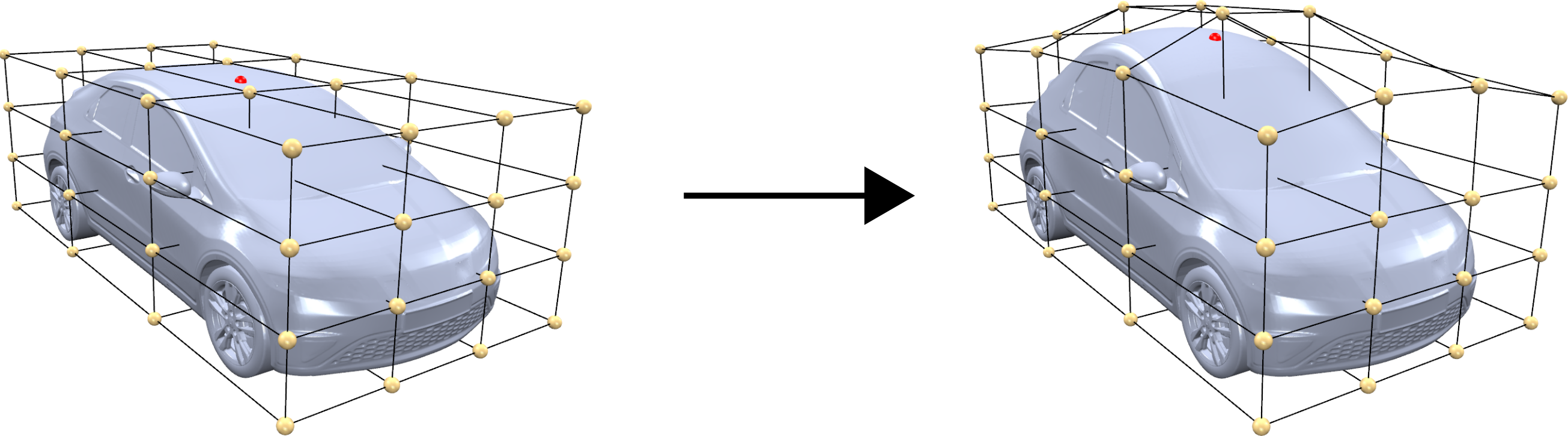
Freeform Deformation
- Space warp function \(\vec{d} \colon \R^3 \to \R^3\)
- Deform each 3D point: \(\vec{p} \mapsto \vec{d(p)}\)
- Deform each mesh vertex
- Deform control points of freeform curves/surfaces
- Tensor product Bezier deformation \[ \vec{d}(u,v,w) = \sum_{i=0}^l \sum_{j=0}^m \sum_{k=0}^n \vec{b}_{i,j,k} B_i^l(u) B_j^m(v) B_k^n(w) \]
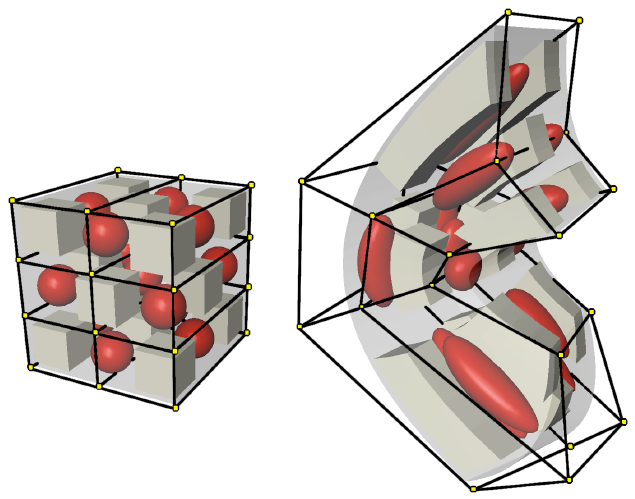
Freeform Deformation
Tensor product spline deformations allow for local control \[ \vec{d}(u,v,w) = \sum_{i=0}^l \sum_{j=0}^m \sum_{k=0}^n \vec{d}_{i,j,k} N_i^l(u) N_j^m(v) N_k^n(w) \]
Direct Manipulation FFD
- How to prescribe displacement constraints?
- Solve linear system for control points
- Can be over- or under-determined
- Pseudo-inverse: least squares, least norm
Direct Manipulation FFD
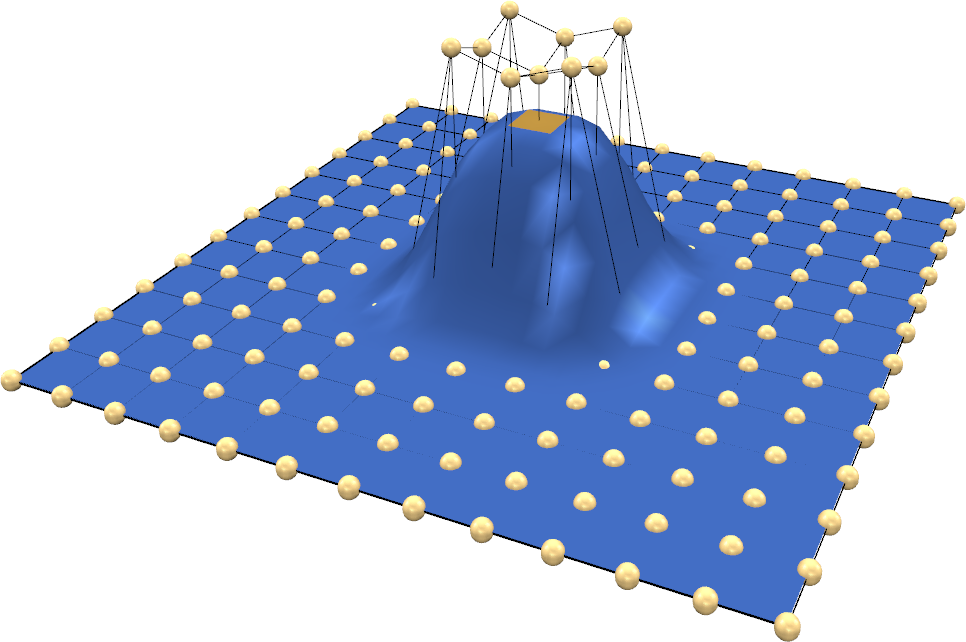
- Bad: results depends a lot on grid resolution
- Minimize control point movement ≠ minimize physical energies!
Modeling Metaphor
- Mesh deformation through displacement function \(\vec{d} \colon \R^3 \to \R^3\)
- Fix some vertices (gray)
- Interactively displace handle vertices (yellow)
- Solve for displacement of remaining vertices (blue)
\[\begin{align*}
\vec{d} \colon {\color{red} \R^3} &\to \R^3\\
\vec{x}_i &\mapsto \vec{x} + \vec{d}\of{\vec{x}_i}
\end{align*}\]
Radial Basis Functions
- Represent deformation by RBFs \[ \vec{d}\of{\vec{x}} = \sum_j \vec{w}_j \, \phi\of{\norm{\vec{c}_j - \vec{x} }} \]
- Triharmonic basis function \(\phi(r)=r^3\)
- Satisfy \(\laplace^3 \vec{d}=\vec{0}\) by construction
- Therefore the deformaton minimizes \[ \int_{\R^3} \norm{\vec{d}_{uuu}}^2+ \norm{\vec{d}_{vuu}}^2+ \ldots + \norm{\vec{d}_{www}}^2 \,\func{d}u\,\func{d}v\,\func{d}w \]
- Leads to very smooth and fair deformations
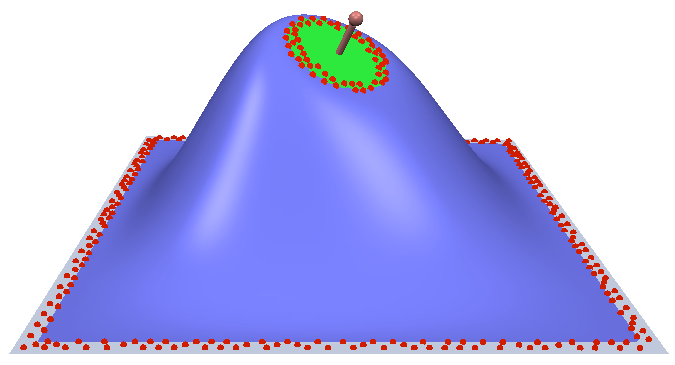
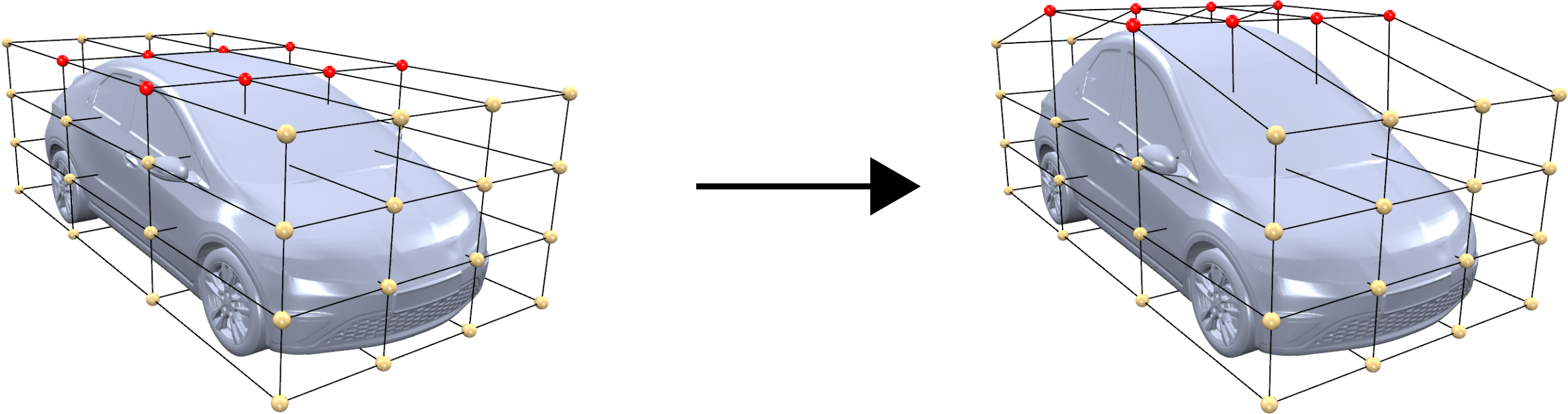
RBF Deformation
- Represent deformation by RBFs \[ \vec{d}\of{\vec{x}} = \sum_{j=1}^n \vec{w}_j \, \phi\of{\norm{\vec{c}_j - \vec{x} }} \]
- Preprocessing: RBF fitting
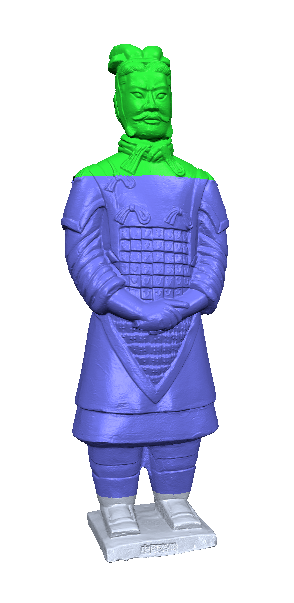
- Interpolate displacement constraints: two rings of vertices at region boundaries (red points)
- Solve dense \(n \times n\) linear system for \(\vec{w}_j\)
- Deformation: RBF evaluation
- Function \(\vec{d}\) transforms all points \(\vec{x}_i\), its Jacobian \(\left( \grad \vec{d} \right)^{-\mathsf{T}}\) transforms normals \(\vec{n}_i\)
- Evaluation can be implemented highly parallel with GPU shaders
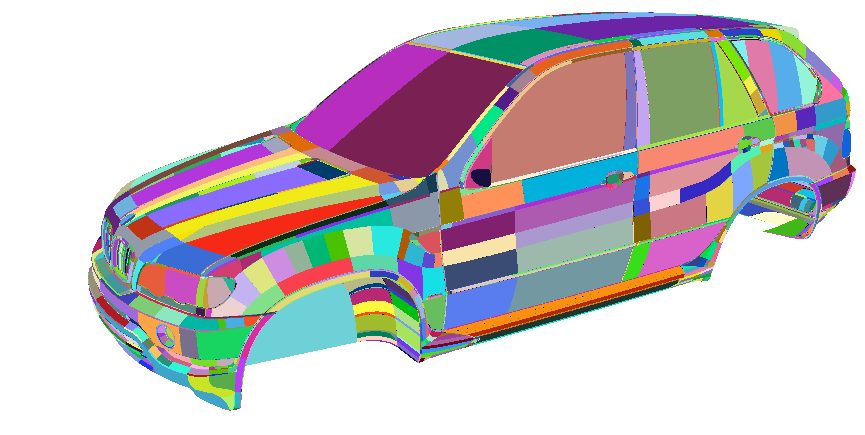
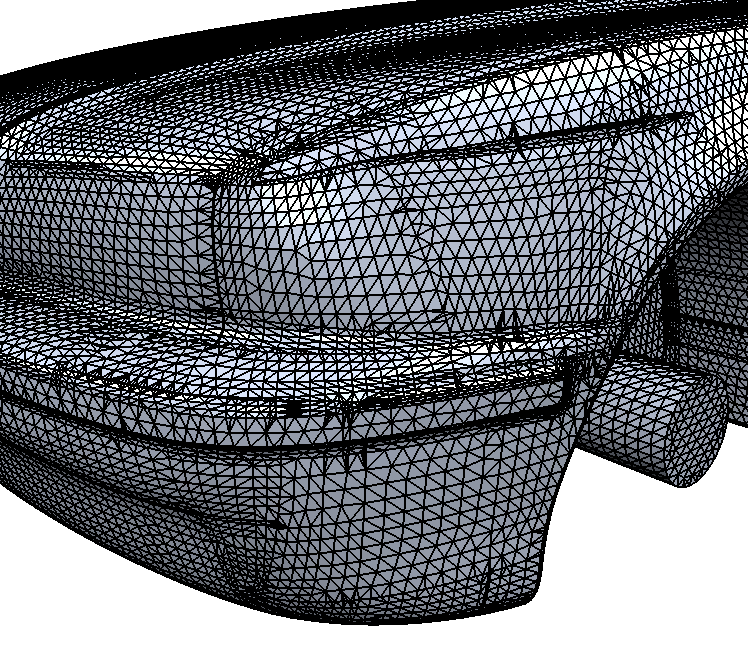
Complex Meshes
“Bad Meshes”
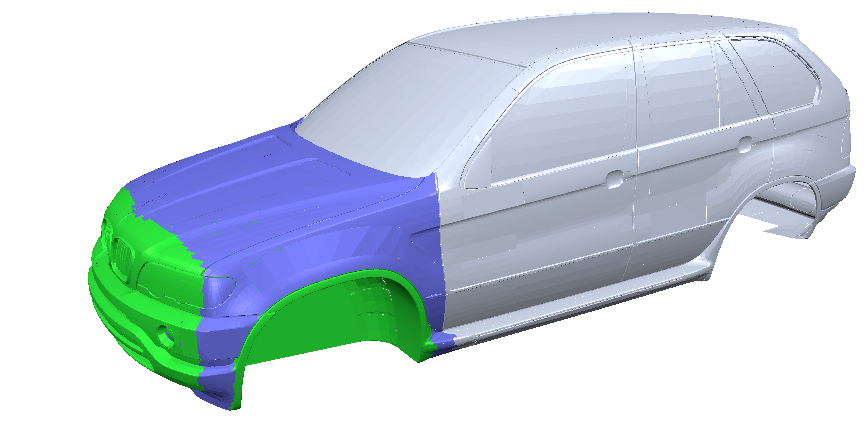
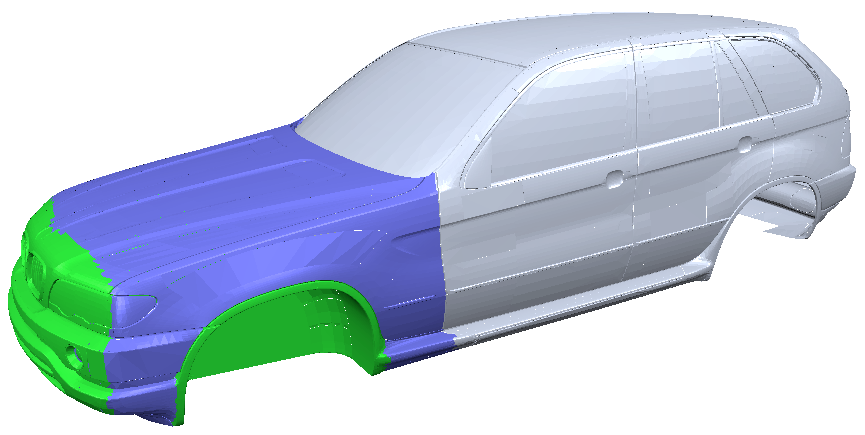
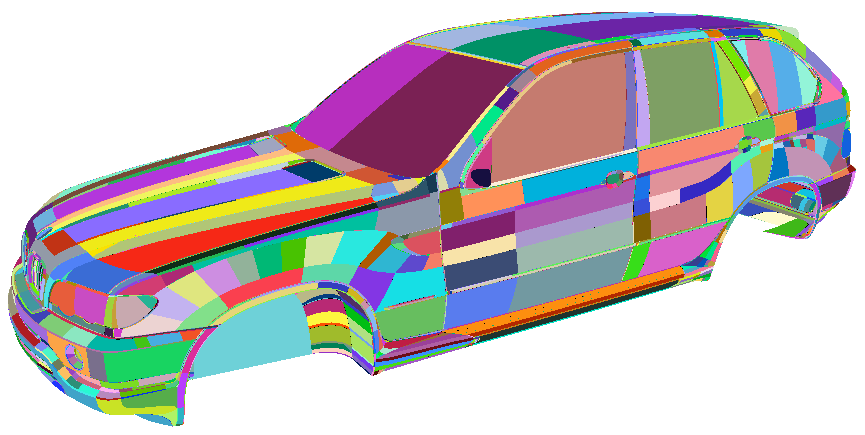
3M triangles, 10k components, not oriented, not two-manifold
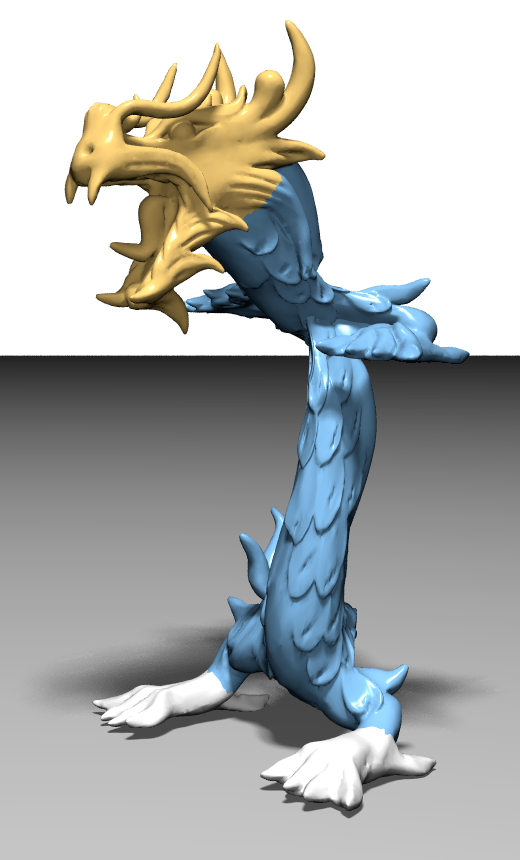
Local & Global Deformations
Local & Global Deformations
Linear vs. Nonlinear
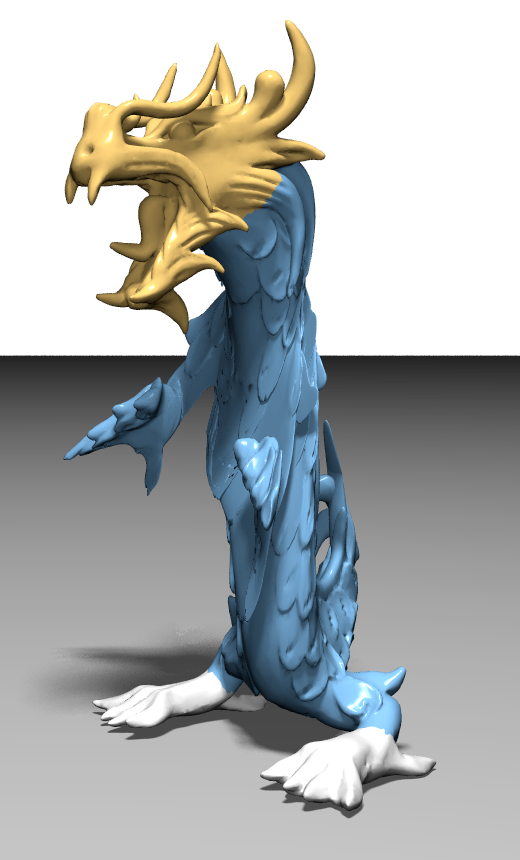
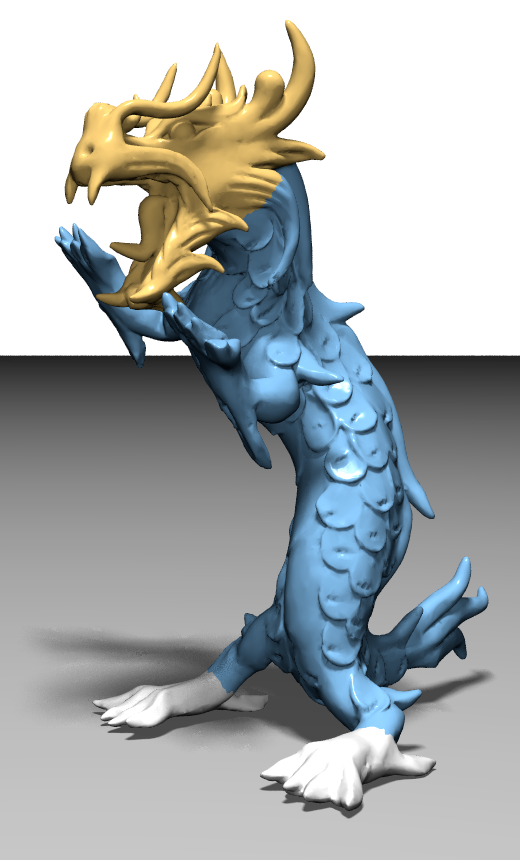
Linear vs. Nonlinear

Literature
- Botsch et al., Polygon Mesh Processing, AK Peters, 2010
- Chapter 9 (without Sections 9.1, 9.3, 9.4, 9.5.2)

- Sederberg & Parry, Free-Form Deformations of Solid Geometric Models, SIGGRAPH 1986
- Hsu et al., Direct Manipulation of Free-Form Deformations, SIGGRAPH 1992
- Botsch & Kobbelt, Real-Time Shape Editing using Radial Basis Functions, Eurographics 2005
- Botsch & Sorkine, On Linear Variational Surface Deformation Methods, TVCG 2008