Title
Digital Geometry Processing
Exercise 6 - Smoothing
Computer Graphics & Geometry Processing
In-Circle Test (CORRECTED)
- How to efficiently compute \(\func{InCircle}\of{ \vec{A}, \vec{B}, \vec{C}, \vec{D} }\)?
- Project onto paraboloid: \((x,y) \mapsto (x, y, x^2 + y^2)\)
- Projected points \(\vec{A}'\), \(\vec{B}'\), \(\vec{C}'\) define a plane cutting through the paraboloid
- 3D intersection curve projects to 2D circumcircle
- \(\vec{D}\) is in/out circumcircle \(\Leftrightarrow\) \(\vec{D}'\) is below/above plane
- \(\vec{D}'\) below/above plane \(\Leftrightarrow\) \(\func{volume}(\vec{A}',\vec{B}',\vec{C}',\vec{D}') < 0\) or \(>0\)
- \[\func{volume}(\vec{A}',\vec{B}',\vec{C}',\vec{D}') \;=\; \func{det} \matrix{ C_x & C_y & C_x^2 + A_y^2 & 1 \\ B_x & B_y & B_x^2 + B_y^2 & 1 \\ A_x & A_y & A_x^2 + A_y^2 & 1 \\ D_x & D_y & D_x^2 + D_y^2 & 1} \]


How to solve the linear system?
- Solve linear system in each iteration \[(\vec{I} - \delta t \, \lambda \vec{L}) \vec{X}^{(t+1)} = \vec{X}^{(t)}\]
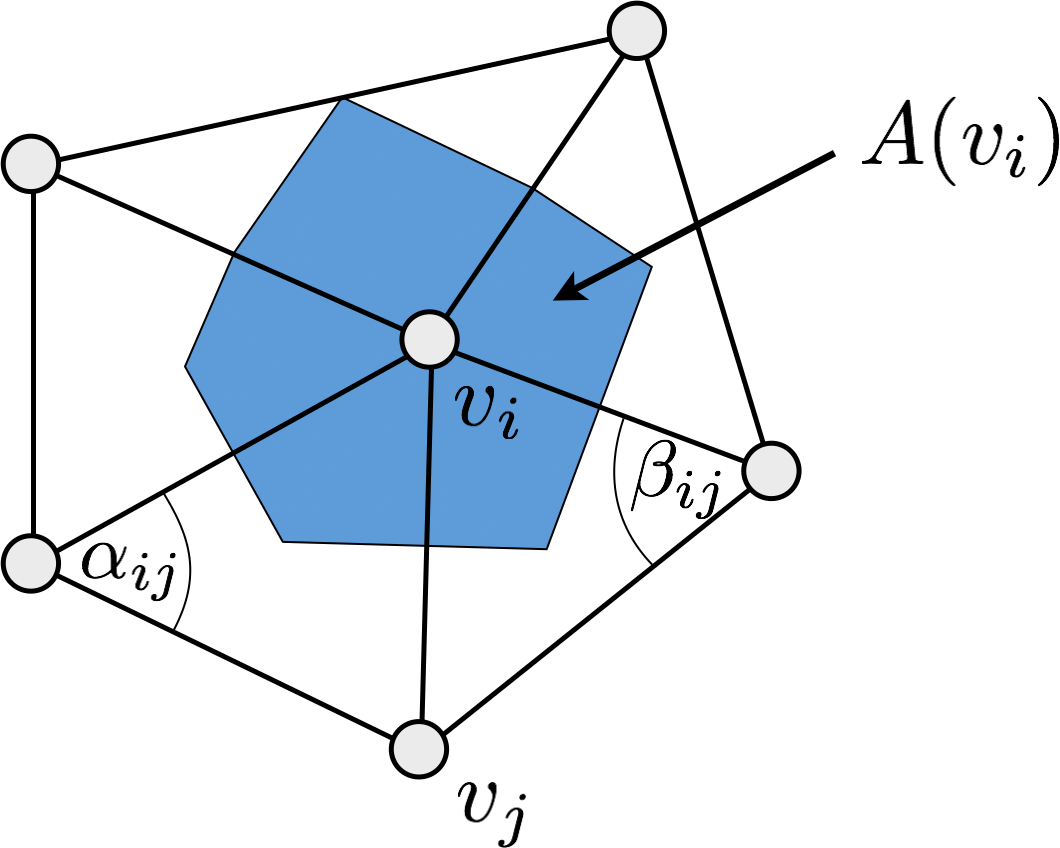
- Matrix \(\vec{L} = \vec{DM}\) is built from Laplace weights \[\mat{M}_{ij} \;=\; \begin{cases} \func{cot}\alpha_{ij} + \func{cot}\beta_{ij}, & i \ne j \,,\; j \in \set{N}_1\of{v_i} \\ - \sum_{v_j \in \set{N}_1 \of{v_i}}\of{ \func{cot}\alpha_{ij} + \func{cot}\beta_{ij} } & i=j \\ 0 & \text{otherwise} \end{cases} \]
\[\mat{D} = \func{diag}\of{ \dots, \frac{1}{2A_i}, \dots}\]